Robot Mini-Golf Striker
Role
MechE
Year
2024
Robot Mini-Golf Striker Overview
The "Robot Mini Golf Striker" project aimed to design a golf-ball-striking mechanism for the 2023-2024 ASME Student Design Challenge. The device, powered by hobby servo motors, attaches to a remote-controlled vehicle to navigate a mini-golf course. It had to be lightweight, capable of putting and chipping, and fit within a half-meter cube. Additionally, the robotic vehicle needed to be able to climb a wooden 2x4.
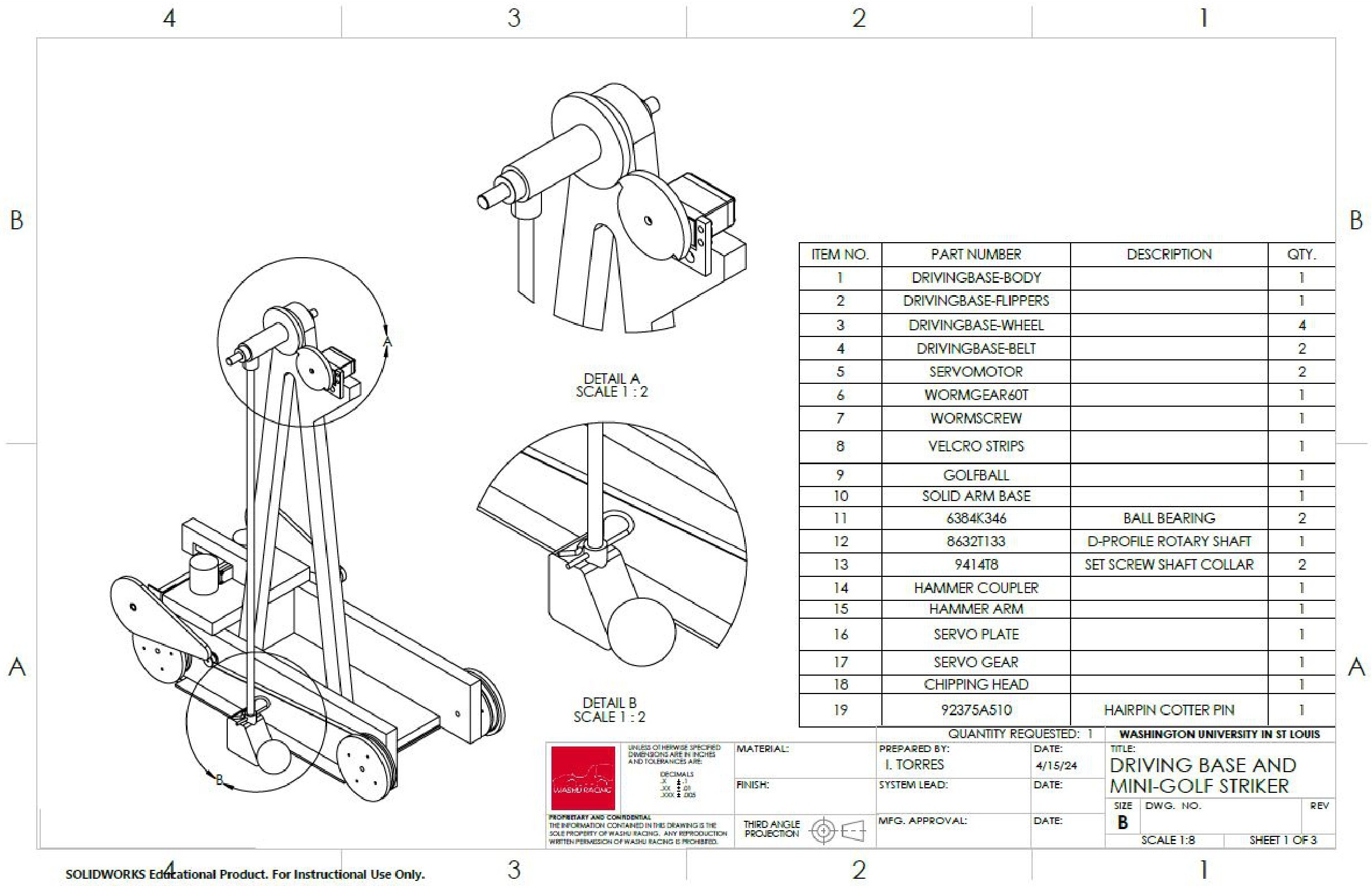
CAD Drawings of the Mini-Golf Striker
The following SolidWorks drawings we created as a team include multiple configurations, an exploded view, component-specific illustrations, and a comprehensive Bill of Materials (BOM).


Isometric View
Employed mission-driven trade studies to shape a high-wing, single-propeller aircraft design, optimizing stability and simplicity. Each design choice reflected our strategic focus on maximizing payload and speed, while reducing total aircraft weight.

Meeting Customer Needs and Design Metrics
The key customer needs for the "Robot Mini Golf Striker" include a lightweight, compact design that can consistently putt and chip a golf ball with accurate speed and angle. The device should reset quickly, be intuitive to control, and have some tolerance for vehicle positioning inaccuracies. Safety, affordability, and a simple, robust design are also priorities.
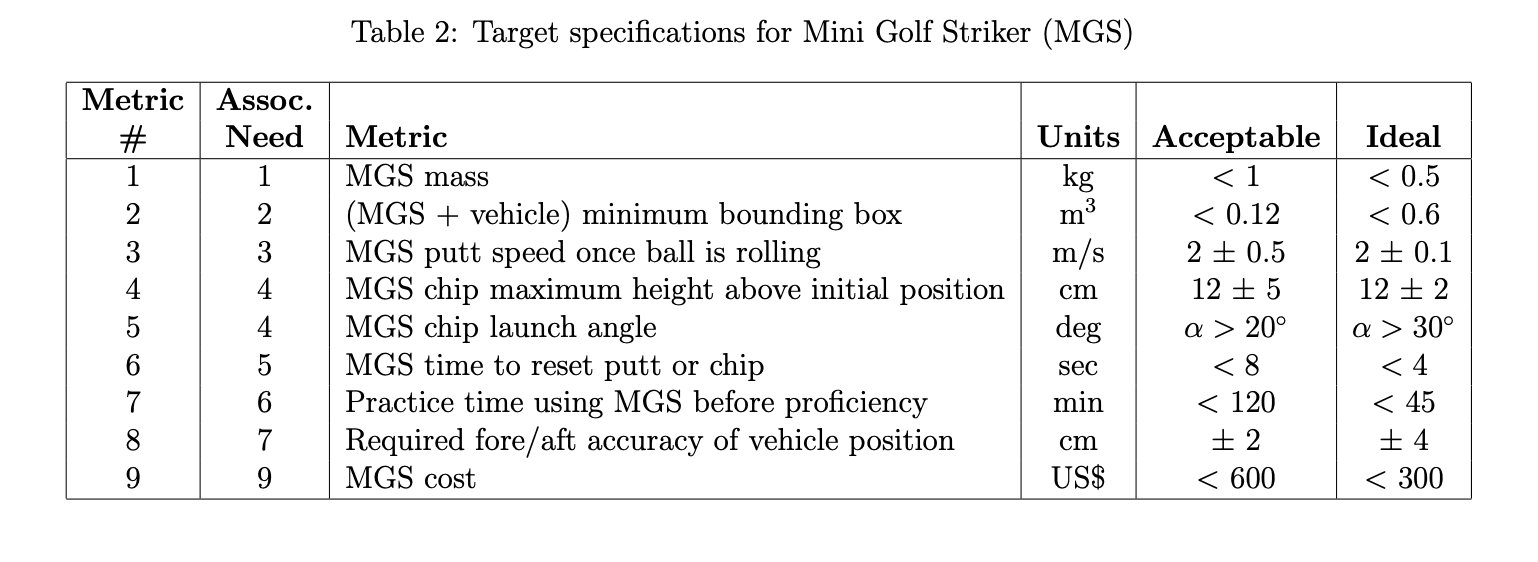
To meet these needs, the design metrics focus on minimizing mass (less than 1 kg ideal), fitting within a 0.5-meter cube, achieving a putting speed of 2 m/s and a chipping height of 12 cm at a launch angle above 20 degrees. The mechanism should reset within 4-8 seconds, require minimal setup time (45-120 minutes), and remain affordable with a target cost under $300.
Function Tree, Morphological Chart, Concept Selection, and Designs
The Function Tree breaks down the primary functions the mini golf striker must fulfill, such as striking the ball (putting or chipping), storing and releasing energy, and maintaining stability on the vehicle. Each function identifies sub-requirements for performance and reliability.
The Morphological Chart maps various potential solutions for each function, including mechanisms for energy storage, control methods, and striking designs. This chart aided in brainstorming alternative configurations for each design requirement.
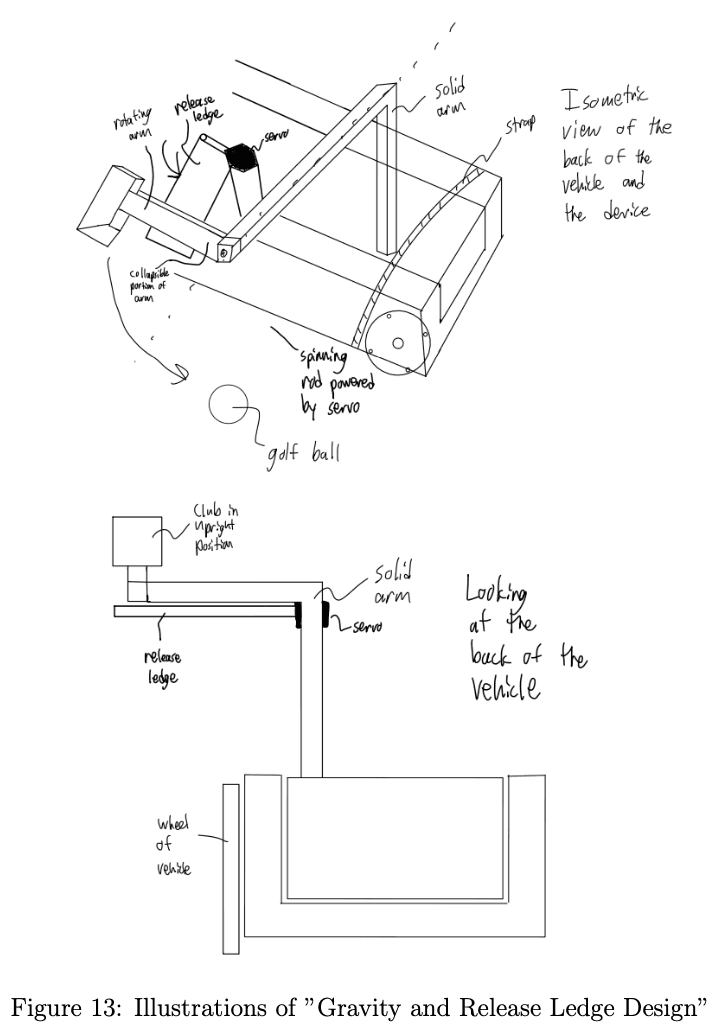
In Concept Selection, four design concepts were generated and evaluated based on criteria like weight, reset time, cost, and ease of manufacturing. The selected design, “Gravity and Release Ledge Design,” emerged as the most effective, balancing simplicity, robustness, and performance.
The four Design Concepts include:
Gravity and Release Ledge Design – Uses gravity to store energy, with a servo-triggered release that rotates the club into the ball for putting or chipping.
PinBall Design – Inspired by a pinball machine, this design uses a compressed spring mechanism to propel the ball.
Linear Spring Design – Stores energy in a compressed linear spring held by a release mechanism that strikes the ball when triggered.
Putt Putt Gravity Design – Features two clubs (one for putting and one for chipping) mounted on opposite sides of the vehicle, which use gravity for energy storage.
Ultimately, the "Gravity and Release Ledge Design" was chosen for its reliability, ease of control, and effective use of gravity to generate consistent striking force.

Performance Evaluation
The Performance Evaluation tested the "Robot Mini Golf Striker" for putting and chipping dynamics, obstacle climbing, and motor torque and speed requirements.
Putting Dynamics: The striker achieved the required putting speed of 2 m/s by leveraging gravity-based energy release, demonstrating consistent horizontal speed after impact.
Chipping Dynamics: For chipping, the device reached the target launch angle and height, with the ball achieving a velocity of 3.07 m/s, suitable for the desired height and trajectory.
Obstacle Climbing: The vehicle faced challenges climbing a 2x4 obstacle, initially exceeding the maximum climbing angle of 30.96 degrees where the vehicle belt starts to slip. Adding a counterweight improved stability and allowed the vehicle to maintain a 30.8 degree climbing angle.
Motor Torque and Speed: Using MATLAB simulations, the motor's torque and speed were evaluated to ensure quick reset times (1.5-2 seconds) for both putting and chipping cycles. The design met torque requirements for reliable operation with minimal energy loss due to friction.
Overall, the performance tests validated the design’s ability to meet competition criteria, with adjustments made for stability and efficiency.
