Mindstorms EV3 AGV Robot With Gripper
Mindstorms EV3 AGV Robot With Gripper Overview
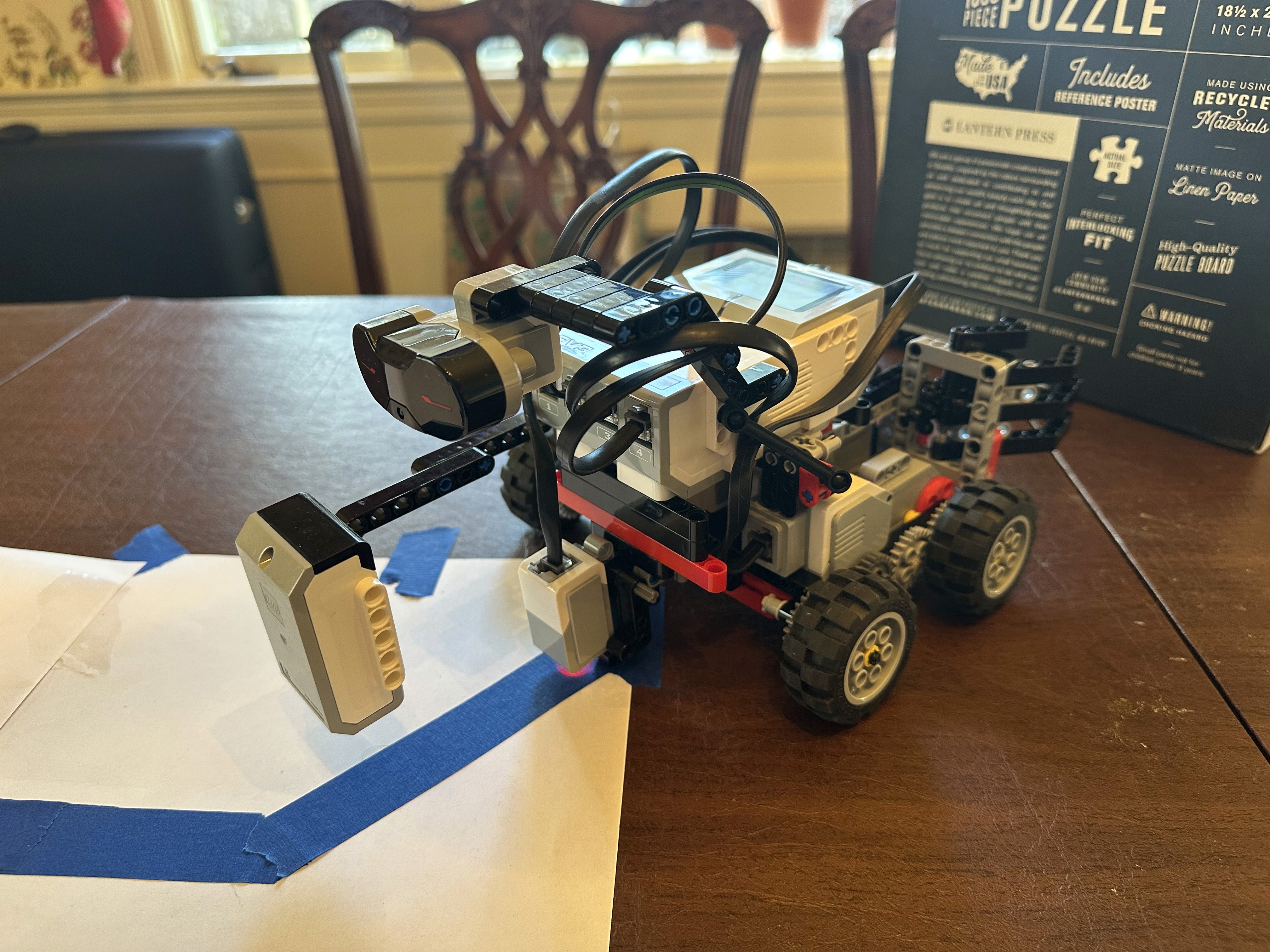
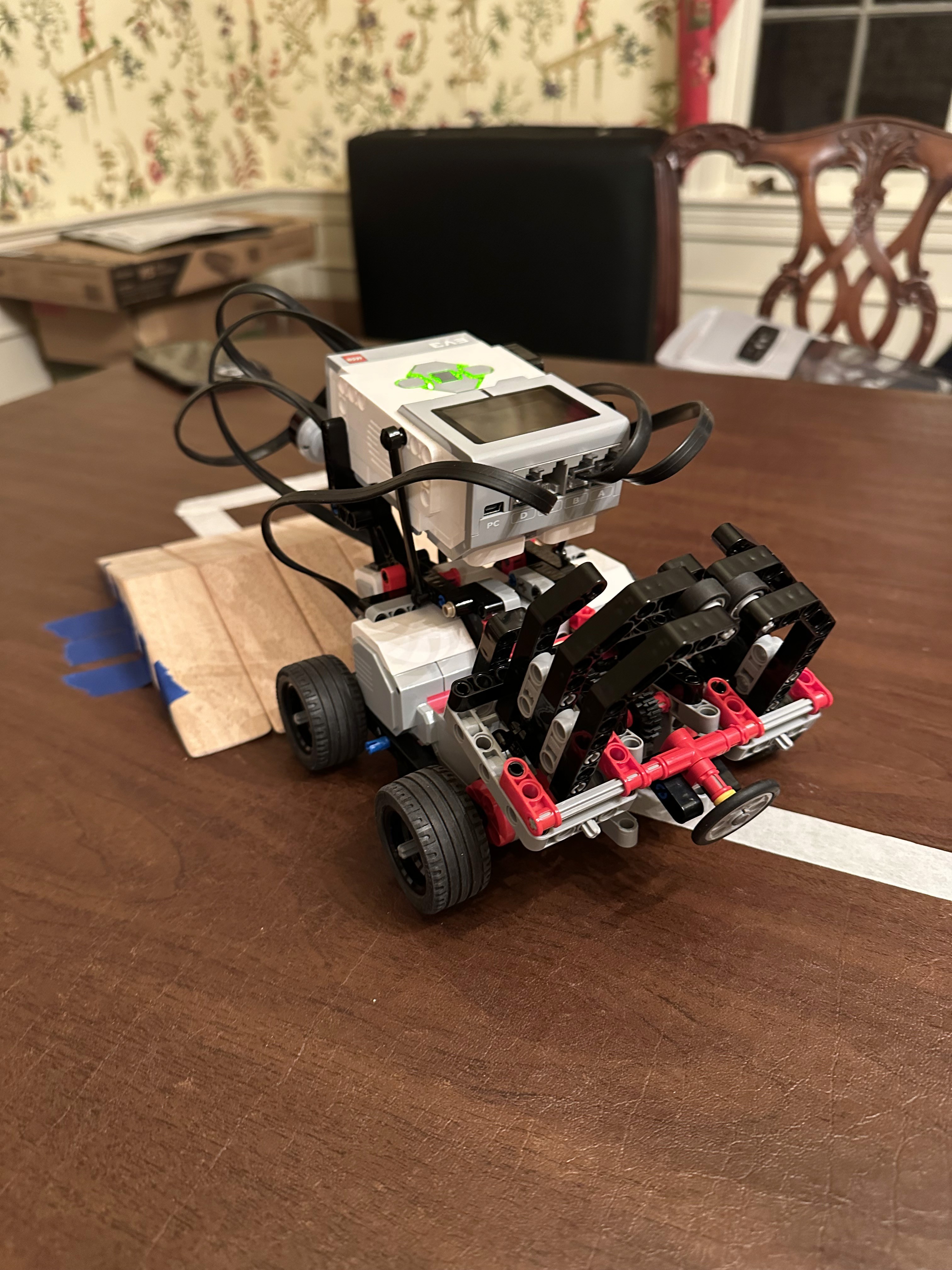
This robot was designed and programmed to follow a line autonomously, grab an object upon detection, and carry the object back to the starting point. I programmed the robot to perform these tasks using Python and LabVIEW to gain experience using both languages. The robot uses 3 motors: one on the left, one on the right, and a motor for the gripper. It also has a color sensor, infrared sensor, and touch sensor.

Python Version: Video and Code
Below is the Python code used in the video above.
LabVIEW Version: Video and Code
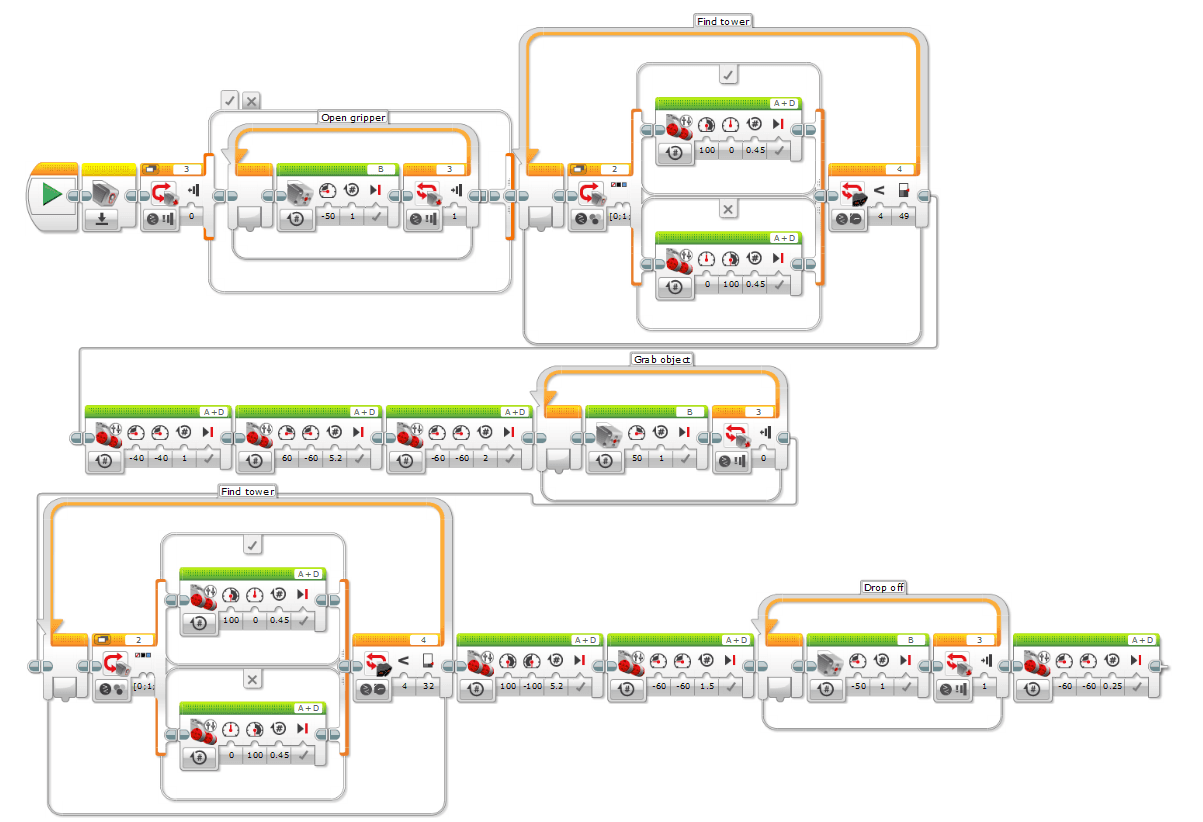
Below is a screenshot of the LabVIEW code used in the video above.
Progression
Initially, the line following the course was short and did not have a ramp as seen in the video below.
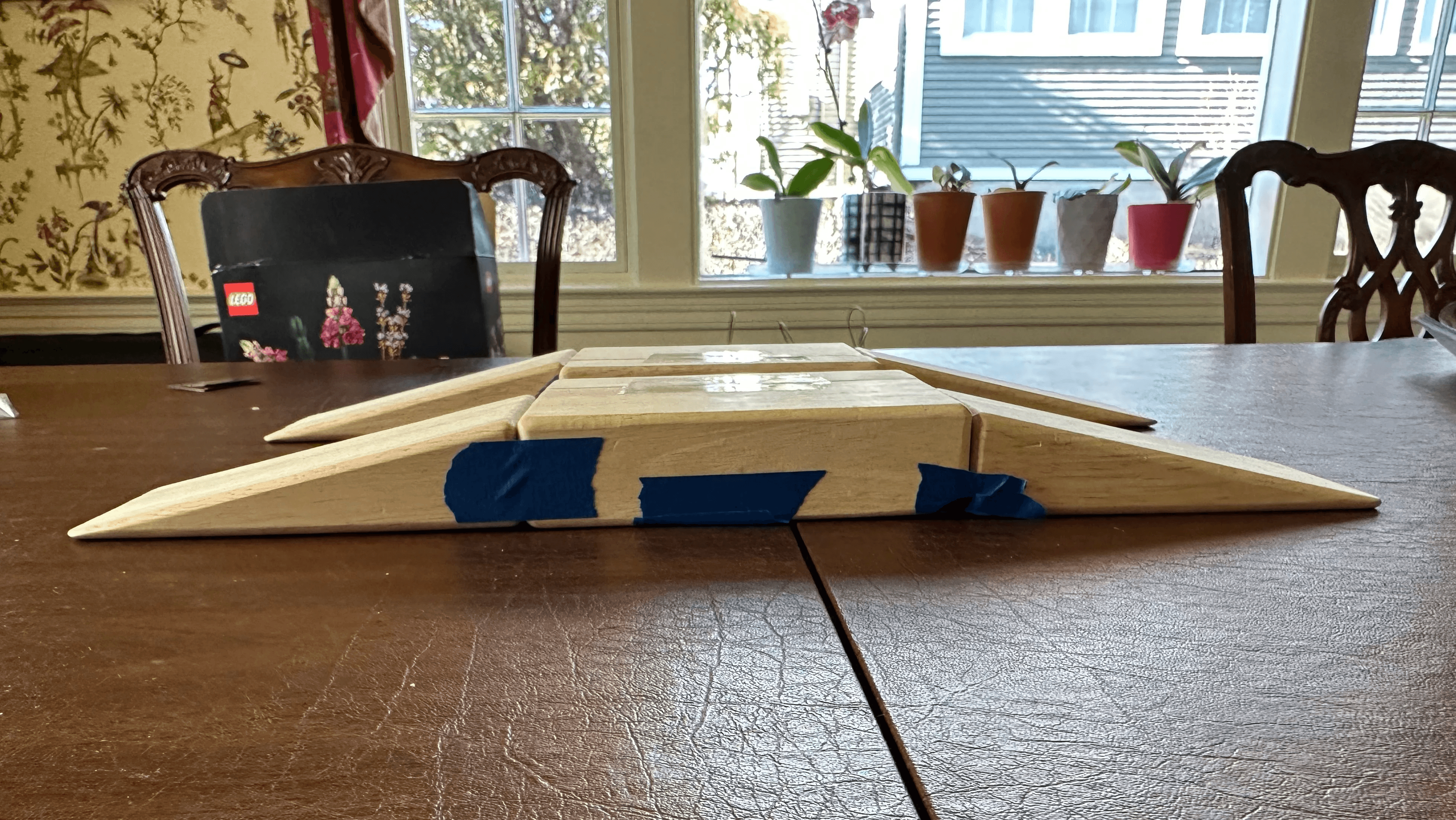
I decided that I wanted to make the challenge harder. I added a ramp made of wooden blocks to add another level of challenge.
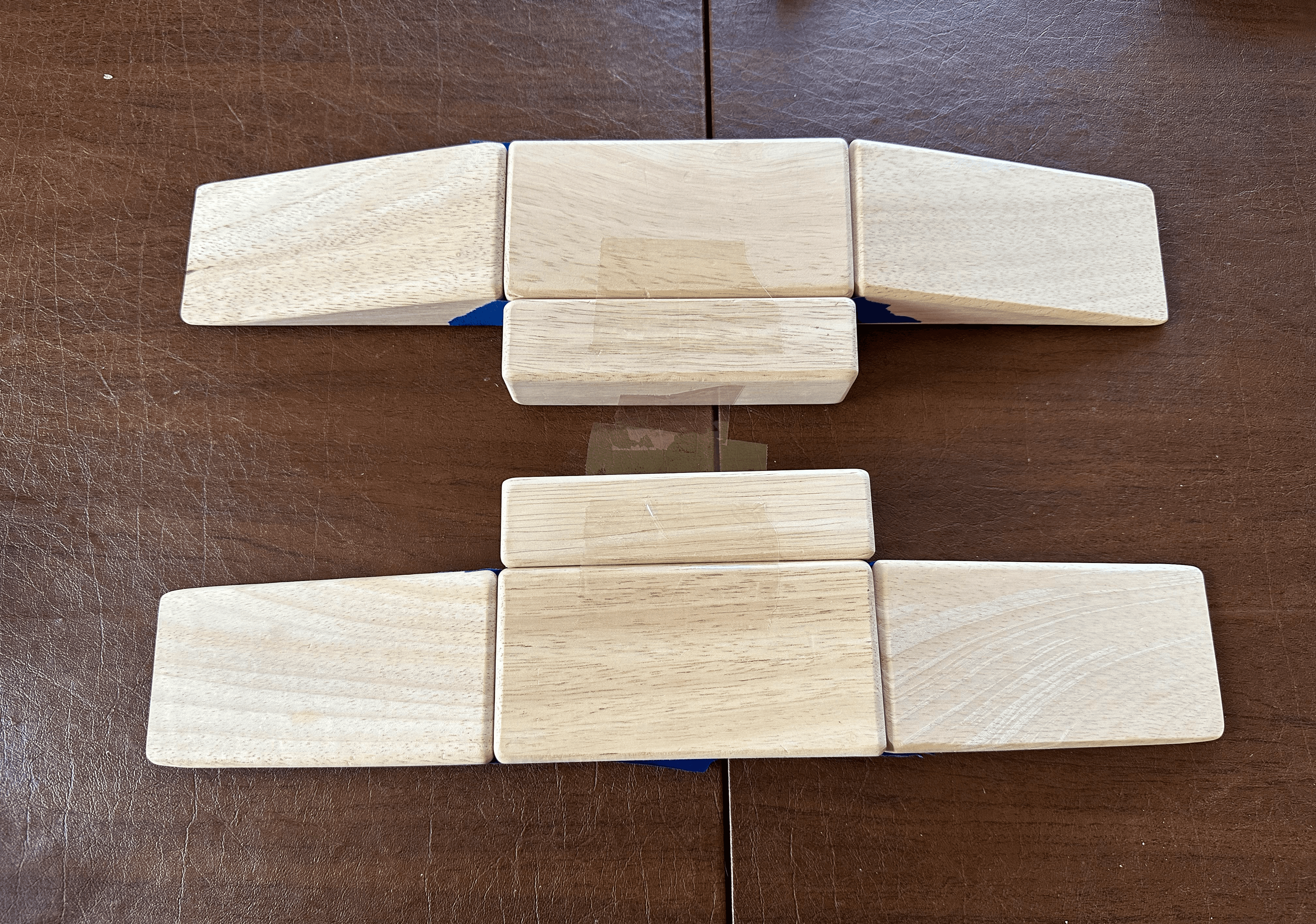
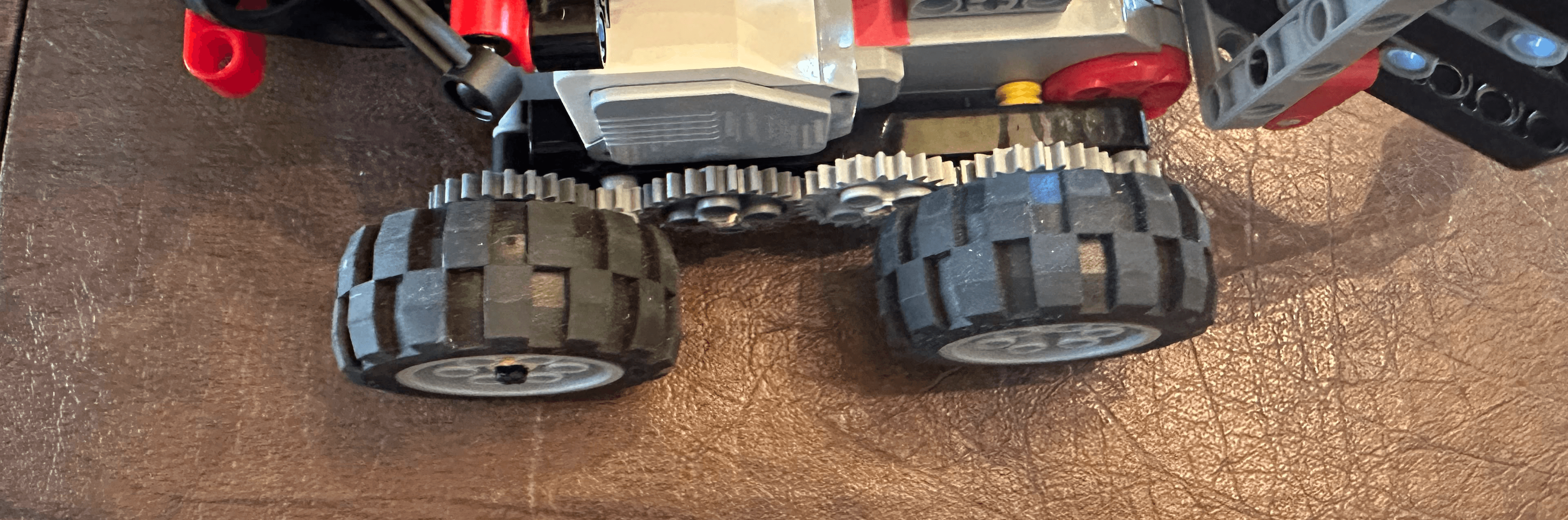
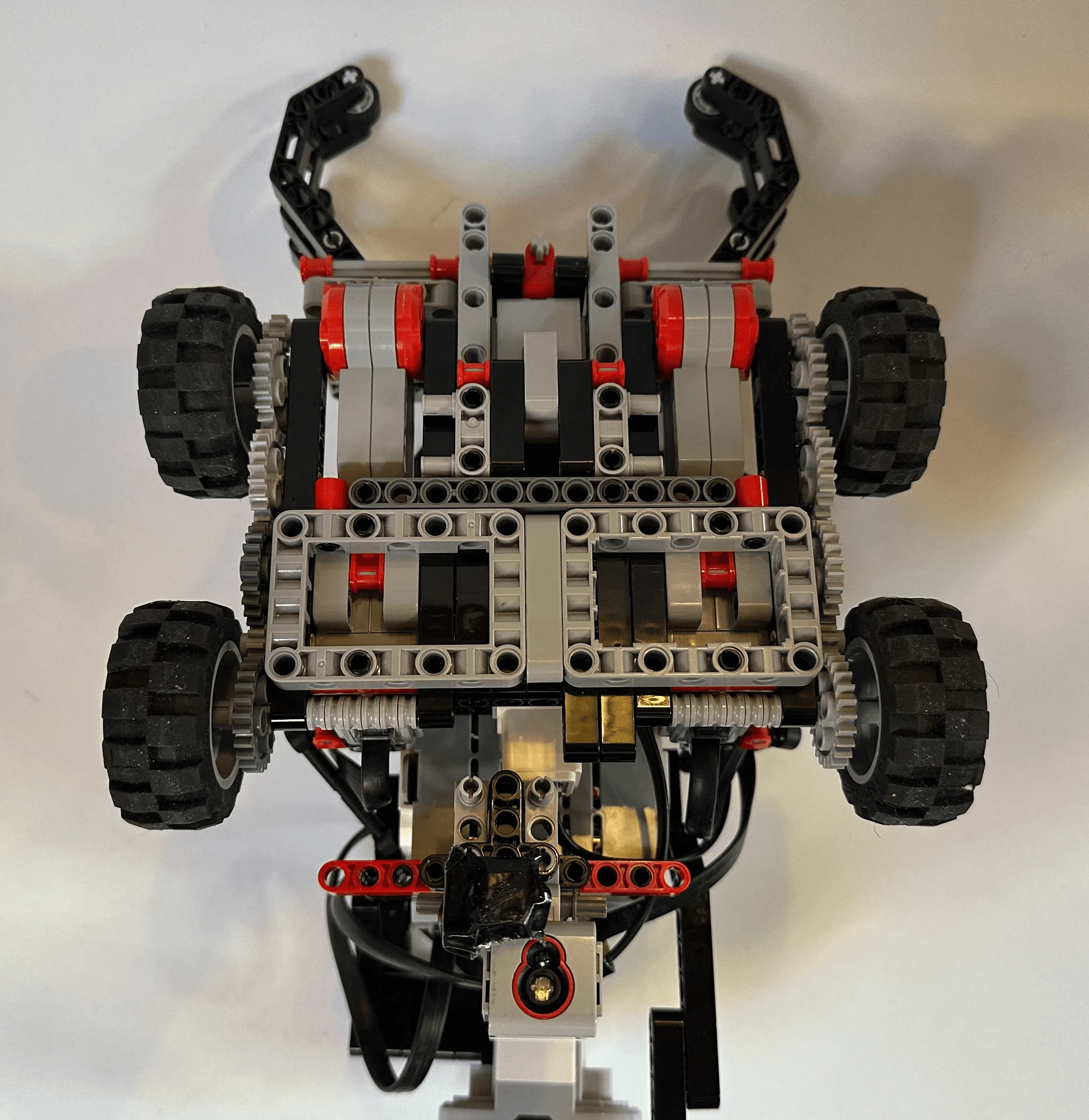
When it came to climbing the ramp, I found that the treads did not have a lot of grip or torque. After testing the treads, smaller wheels, and larger wheels, the larger wheels did the best climbing the ramp.
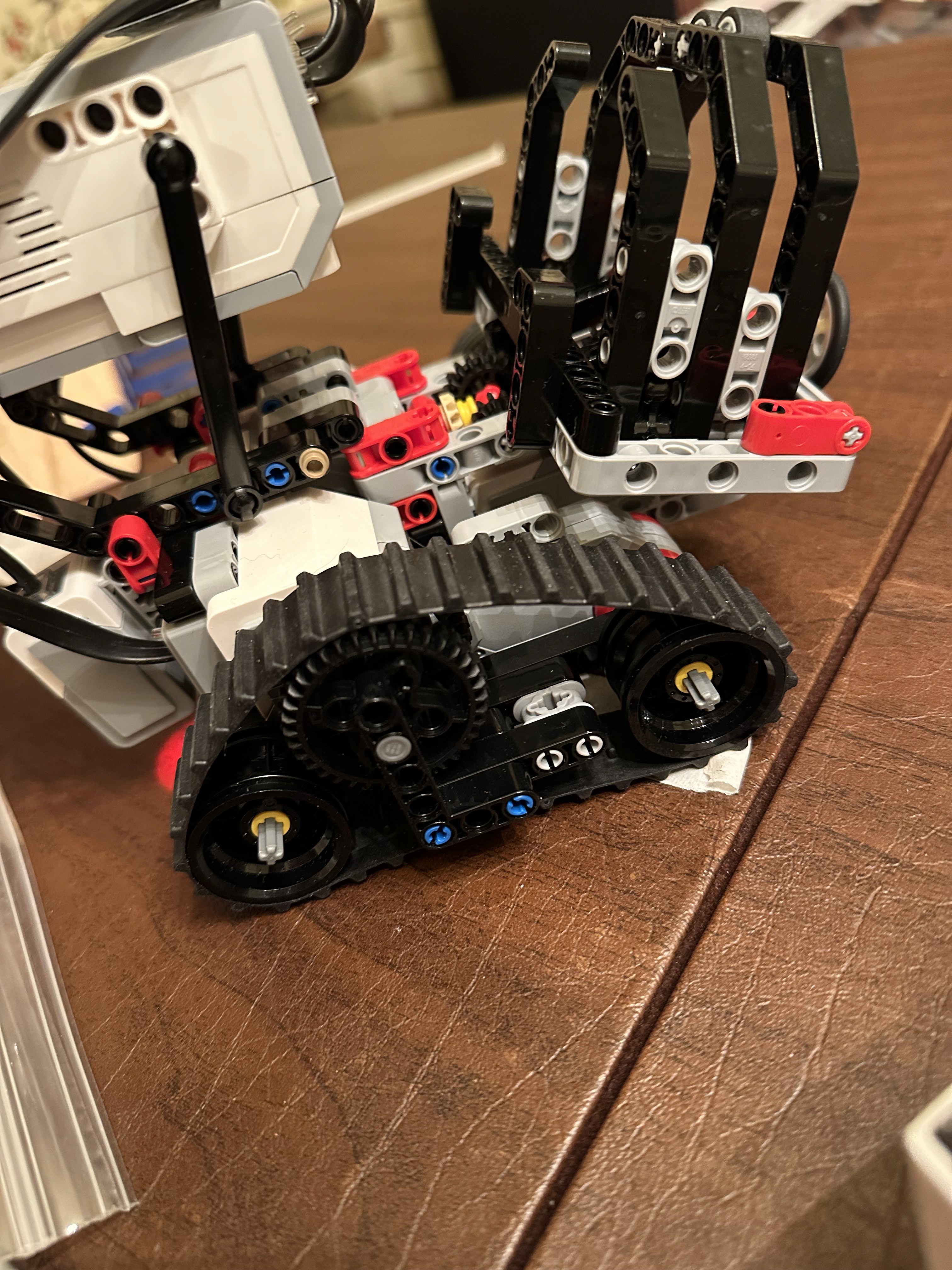
I also added a gear train to the driving base to add more torque. A small drive gear is attached to the motor to help the wheel attached to the larger output gear achieve greater torque.
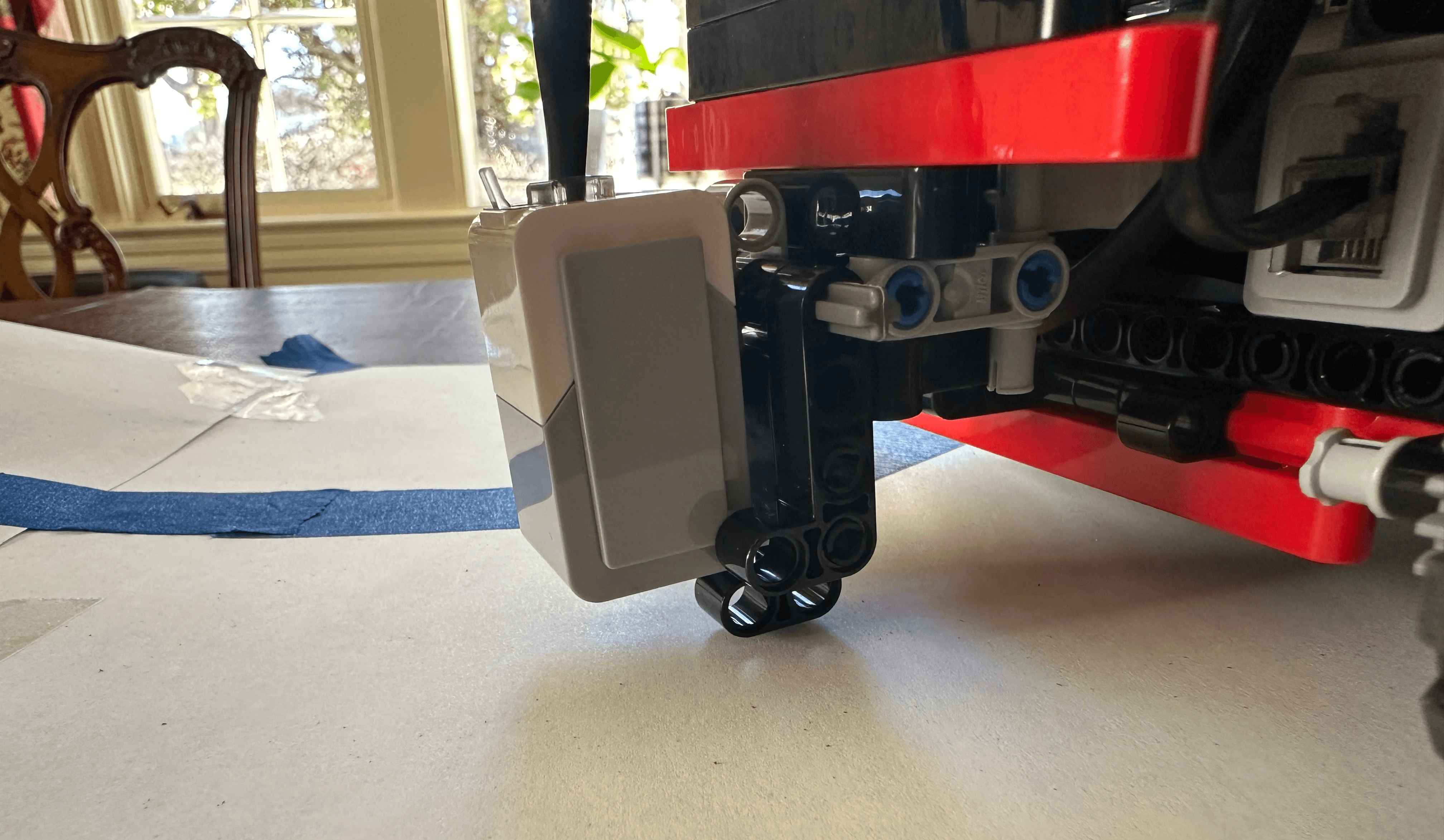
A small L-shaped beam was added just below the color sensor to ensure that the color sensor would never fully flatten against the ground and lose sight of the line
Extra bushings and beam supports were added to the robot's drive base to prevent the axles from bending under the robot's weight. This helps to prevent parts from breaking or falling off and improves the accuracy of the robot's turns.
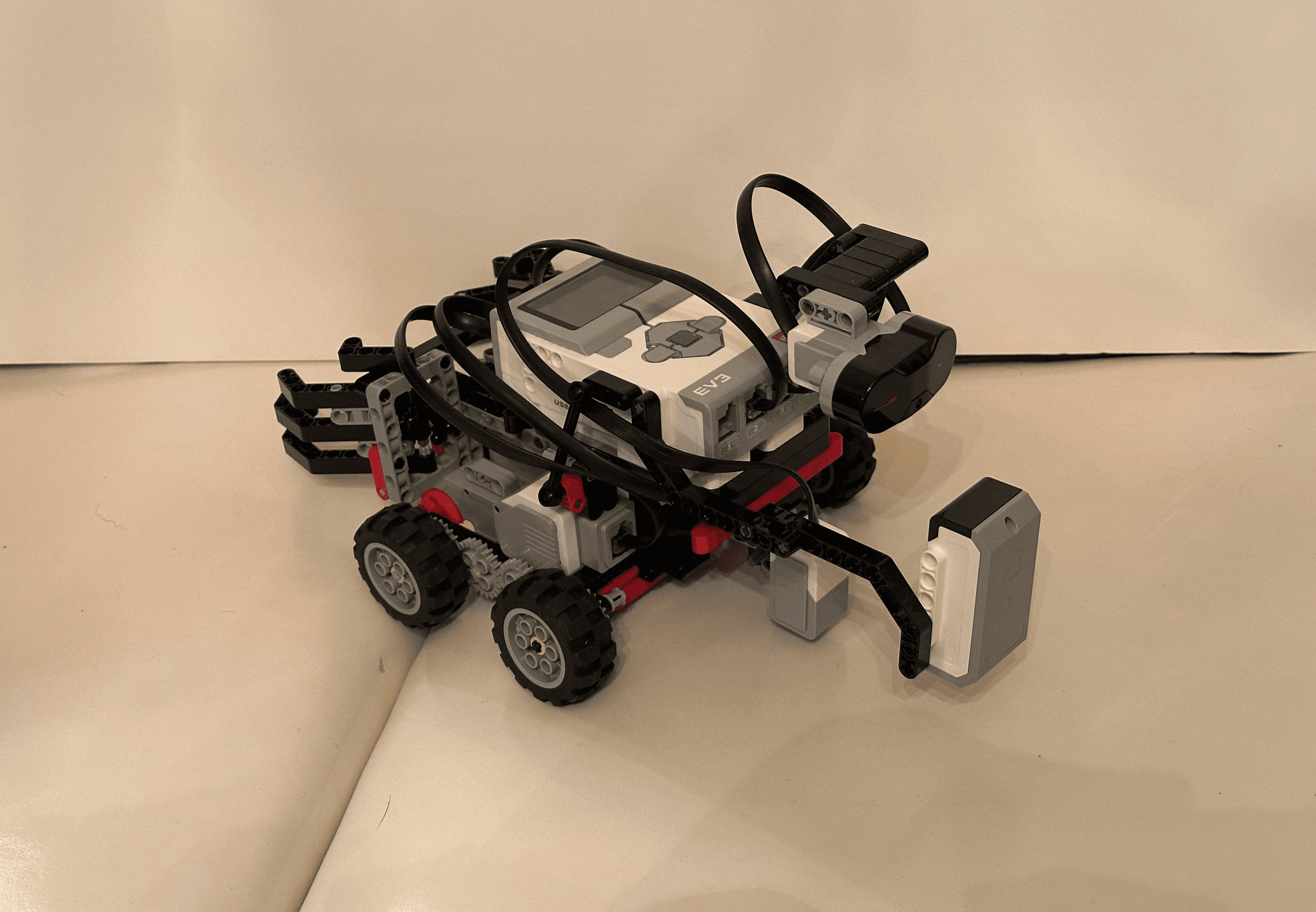
Other Views